欢迎关注“创事记”微信订阅号:sinachuangshiji
文/Chelsea Yang
来源:硅谷洞察(ID:guigudiyixian)
特斯拉致死车祸的调查结果终于公布了。发生在2018年3月加利福尼亚州山景城附近的高速公路上的严重车祸,曾导致38岁的苹果软件工程师黄伟伦(Walter Huang)死亡。
在事故中,Walter Huang驾驶Model X以71英里的速度撞上了101高速公路的护栏,后面两辆车也因此追尾,导致特斯拉的高压电池受损,引起了火灾。
美国国家运输安全委员会(NTSB)列出了特斯拉致死的三个可能原因:第一,特斯拉Autopilot自动驾驶系统存在缺陷,第二,黄伟伦对自动驾驶系统过度依赖,导致其驾驶时玩手机分散注意力。第三,加州交通运输部门没能及时维修高速公路的硬件设施。
特别值得注意的是,NTSB谴责特斯拉过分夸大其自动驾驶的程度,只达到了L2自动驾驶级别,却把自己包装出了L5的形象。并且当事故发生时,特斯拉的前向碰撞预警系统未能提醒车主注意正在逼近的障碍物,其自动紧急制动系统也未能在碰撞前启动。
那么,被NTSB谴责为只有L2级别的Autopilot到底是什么?其处在自动驾驶第几梯队里?为何特斯拉这么有自信一直坚持用 Autopilot呢?

NSTB讨论大会现场,图片来自互联网,版权归作者所有
Autopilot的演变史
Autopilot就是自动驾驶系统吗?Autopilot的原始定义是指的搭载在飞机、轮船或者火箭上的控制轨道的系统,在这种系统中,人不需要一直控制,而自动驾驶的定义是指车辆能够自动感应周围环境并且无需人类的干预而自动驾驶,所以从原始的定义来看Autopilot是辅助系统而非特斯拉一直在公众面前宣传的自动驾驶系统,那是它尚未实现的、未来的目标。
2016年8月16日以后特斯拉也正式将中国官网的介绍从“Autopilot自动驾驶”改成了“Autopilot自动辅助驾驶”。其功能包括在车道内的自动辅助转向、加速和制动,但需要驾驶员主动监控,并且双手不能离开方向盘,一旦离开方向盘,Autopilot就会发出警告声提醒车主将双手放出方向盘,如果车主忽略警报,车就会自动减速,即便车主接管车辆,辅助驾驶功能也会被禁用,只有当下一次驻车时才能恢复自动辅助驾驶的功能。
在美国国家公路交通安全管理局(NHTSA)公布的自动驾驶分级体系中,特斯拉目前已经实现了L2的功能(如搭载在Honda等车上的ACC自适应巡航系统),并部分实现L3的功能,比如Autopilot能够实现对周边环境的监控,所以很多人把特斯拉归进了L2.5的梯队。
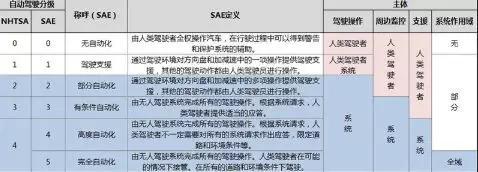
自动驾驶分级体系,图片来自互联网,版权归作者所有


特斯拉官网对自动驾驶辅助系统的介绍,版权归作者所有
Autopilot对2016年10月20日的所有新车都进行了升级,软件升级到了8.0系统,升级了200多项功能,硬件系统从原来的Autopilot1.0升级到了现在的HW3.0,但是目前3.0还没有完全落地到车主,所以我们重点来看看1.0到2.5的变化。
Autopilot 1.0 基于Mobileye的图像识别技术,主要数据来自于车顶的Mobileye摄像头,车首的雷达和周边雷达只是提供辅助信息。
而Autopilot 2.5则是基于雷达识别环境,主要数据来源于车身上的雷达,而辅助数据则来源于高精度地图和神经网络数据。

特斯拉HW1.0芯片,有大量留白,图片来自互联网,版权归作者所有

特斯拉HW2.5芯片,设计紧密很多,图片来自互联网,版权归作者所有
坚持用雷达,特斯拉特立独行之路
自动驾驶目前的技术分为两大阵营,一类以特斯拉为首,还有一类是以刚刚首次获得有外部投资参与的、22.5亿美元融资的Waymo为首。
特斯拉依靠的是结合雷达、摄像头和超声波传感器的数据,搭建神经网络做实时的图像识别,并模拟人的行为,做出判断,而Waymo是靠比雷达更昂贵更精确的激光雷达、摄像头、超声波传感器并结合已经有的高清地图数据库来判断应该做出什么反应。

特斯拉官网硬件宣传,图片来自互联网,版权归作者所有
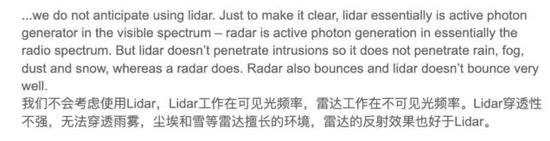
那么为什么Waymo和众多自动驾驶研发的车厂都使用激光雷达(Lidar),而特斯拉却坚持使用雷达(Radar)呢?特斯拉都看上了雷达什么呢?
雷达和激光雷达两者最本质的区别在于波长不同,雷达是毫米波,通常是4-12mm,而激光雷达用的是激光波长,所以通常在900-1500nm之间。
雷达主要用的是无线电波,与激光波相比,无线电波更容易穿透物体,所以传播距离更远,通过反射的波,可以测到汽车的行驶速度。当交警想要测某一辆特定车辆的速度时,就可以用雷达枪来测速,这样车辆跑到很远也可以测到。但是,由于雷达成像的特殊性,一个很小的金属物体可能会被识别成一堵墙,所以人们才会把目光转向了非常昂贵的激光雷达。
激光雷达发出的是快速的激光脉冲,传播的距离较短,但是它能精确计算出传感器到障碍物间的距离,还能探测目标物体的准确尺寸,并且它的穿透力极强,能够穿过雨、雾等极端天气,受干扰较小,跟人眼看到的东西很类似。所以激光雷达被用来绘制高清地图。

激光雷达图,图片来自互联网,版权归作者所有
目前几乎所有研发自动驾驶的公司都在使用激光雷达,但特斯拉的车只搭载了雷达,尚未搭建激光雷达,主要原因还是成本。
激光雷达的车本过高,如Waymo使用的Velodyne的、已经量产的16线激光雷达,需要3.5万到4.5万人民币,更高级的32线需要40万,64线需要80万,而特斯拉的车都是商用卖给普通群众的,高额的成本必然会降低销量,所以特斯拉目前只能使用雷达。当外界问到特斯拉未来是否会使用激光雷达时,一向傲娇的马斯克一直持否决态度。
图片来自互联网,版权归作者所有
但是值得一提的是,特斯拉相比Waymo有数据上的优势。目前在自动驾驶领域,处理突发情况,如突然冲出马路的小孩等,需要非常大规模该类的数据学习,才能做到更好地处理,所以车在实际的道路上驾驶的数据就非常重要了。Waymo只在美国凤凰城商业落地了,推出了打车服务,而特斯拉已经满世界都在跑了。截止到2019年,特斯拉驾驶里程数为20亿英里,是Waymo约2亿英里的10倍。
Autopilot目前面临的主要问题在于过度依赖摄像头和雷达,这两个用来检测周围环境的仪器都存在很大的误差,没有激光雷达精确,但是特斯拉相信只要要神经网络足够强大能够模拟人类的驾驶行为,即便结合的是不那么准确的监测环境的数据,也能够实现自动驾驶。
简单来说,当特斯拉驾驶者经过一个很矮、很窄、很暗的隧道时,雷达和摄像头都无法清晰地检测出隧道入口的情况,Autopilot就会借用神经网络里训练出来的、以前的数据来计算和判断。例如,以前有特斯拉车主曾经过这个地方,Autopilot就会学习到这些人是成功通过还是未能成功通过,当成功通过的概率达到一定比例时,这个地方就会被标记成能够安全通过的地方。这就是Autopilot靠神经网络学习人类驾驶行为,而不是靠非常精确的现实画面来判断的机理。
随着Autopilot硬件3.0的到来,拥有海量数据优势的特斯拉的算法迭代有可能会更加快速,对边缘情况的处理也会随之更加平滑。但是,目前搭载了特斯拉自主研发的芯片的HW3.0硬件系统和神经网络的能力还非常有限,要改进极为复杂的深度神经网络,达到和人脑相似的判断能力,还是困难重重。
特斯拉驾驶员监控系统也有待提升
除了指出Autopilot的问题,NTSB在听证会上还提出,特斯拉应该“合作开发”驾驶员监控系统的建议。
2018年的事故中,车主黄伟伦过分依赖特斯拉的自动驾驶功能,在驾驶时被系统多次提醒需要双手放在方向盘以后,但依然专注于玩手机上的游戏。NTSB直言不讳地指出,如果特斯拉不加装监控装置,自动驾驶系统还将被滥用,类似事故还将会发生。
一直以来,特斯拉都是依靠压力传感器来感应车主是否将双手放在方向盘中。早在2016年,特斯拉第一次发生致命事故时,NTSB就提醒特斯拉应开发出一套更加智能的系统,监控车主是否把注意力放在道路和交通状况上。NTSB还强调,应该引入如摄像头这类的视觉监控来更好地监测。
但是,特斯拉一直对NTSB的提醒总是充耳不闻,没有任何反应。
特斯拉车主在驾驶的时候会走神、分心去做别的事情,其实也跟特斯拉早期的夸张宣传有关系,而现在特斯拉专注技术研发,对偶发的车祸事故并没有表现出足够的解决问题的态度。当然,如果要按NTSB的建议,特斯拉的生产成本又要有所增加。
那么,各位读者对特斯拉车祸有什么看法?特斯拉真的能做到低成本造车的同时保证安全吗?